2023年8月28日
【広島大学の若手研究者】制御モデル化し設計開発 産業応用視野に人材育成にも力
プレスネットでは、広島大学の若手研究者に着目しその研究内容についてインタビューしています!🎤
今回お話を聞いたのは
大学院先進理工系科学研究科 准教授
脇谷 伸さん
研究分野は制御工学
制御モデル化し設計開発
産業応用視野に人材育成にも力
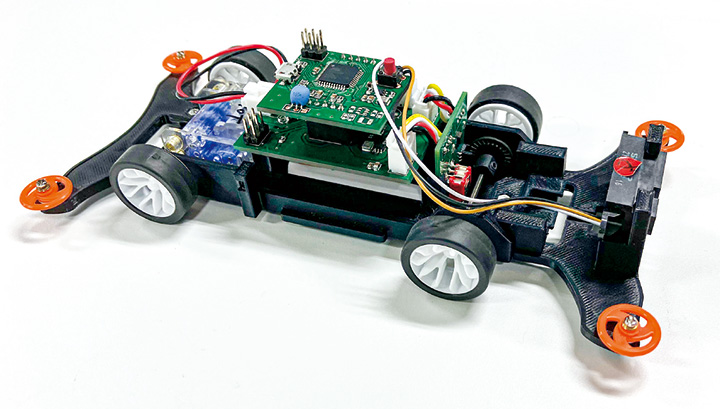
制御とは、何かを思い通りに操ることですが、現在の世の中では、大半のモノは制御され、その技術は自動車やロボット、電気製品、工業機械など、いろいろなところで産業応用されています。モノを思いのままに動かす面白さと、新たな可能性を追い求め研究を続けています。

今、取り組んでいる研究テーマです。MBDに基づく制御システム開発では、実機(制御対象)およびコントローラ挙動をすべて数理モデル化し、バーチャル空間でシミュレーションによる検証を行いながら最適な制御システムの設計開発を行います。MBDを活用することで、実機(モノ)ありきで、制御の検証を進めていくのと違って、製作工程の大幅な短縮やコスト削減が図れることから、近年、産業界で積極的に導入が進んでいます。
ただ、実際には制御対象の完璧なモデル化は難しく、ある程度のモデルをつくってコントローラ構造を決定したら、実際にモノを動かしながらデータを取得し、コントローラを再調整するという大きな枠組みで、設計開発を進めています。
サッカー選手を例にとると、対戦相手やフィールド(制御対象)を事前にモデル化し、選手自身(コントローラ)の動きをイメージトレーニングするまでがMBDによる制御システム設計。実践を通じてさらに相手の情報を収集して自身の動き(制御の方法)を修正していくといったイメージです。これをモデルとデータを融合したスマートMBDと呼んでいます。
実際の産業現場では、MBD概念はわかるものの、実際の仕事にどのように適用すべきか悩むエンジニアが多く見受けられます。
このため、2016年にMBDの専門人材を育成する「MBD基礎講座」が広島大に設立され、19年には「デジタルモノづくり教育研究センター」が内閣府の交付金を受け発足、社会人を対象に人材育成のカリキュラムを構築しました。これらの活動によって培われた広島型MBDの振興と普及を使命に、広島大発のベンチャーを興すことになり、21年、(一社)デジケーションを設立しました。
デジケーションでは、数学(算数)・理科・プログラミングなどを横断的に活用する力としてMBD的思考を提唱しています。自動車を題材としたMBD的思考を育む教育を小学生から大学生まで一気通貫して実施する取り組みも行っています。もともと教員志望だったこともあり、研究と同じくらい、教育にも比重を置いています。
難しい数式を使ってモノが動く真理を追究するのが制御工学。ただ、産業応用を考えたとき、コントローラが複雑すぎると使う側の企業からは敬遠されがちです。難しい数式から要点を抽出し、性能を担保しながら使いやすいコントローラを構築する―。産業応用を意識した研究のだいご味でもあり難しさでもあります。