プレスネットでは、広島大学の若手研究者に着目しその研究内容についてインタビューしています!🎤
今回お話を聞いたのは
広島大学大学院先進理工系科学研究科 准教授
村松 久圭さん

専門はロボティクスと制御工学の研究
■研究者を目指すきっかけ
子どもの頃から数学や理科は好きで、自然と理系に進みました。大学でも興味の赴くままに研究室を選び、面白いと思えるテーマに取り組んできました。研究が楽しく、「これを仕事にできたら幸せだ」と感じたことがきっかけですね。
最初から高い目標を掲げていたというより、好きなことを一つずつ積み重ねてきた延長に、今があると感じています。
■専門分野
ロボットなどさまざまな機械の動きを精密にコントロールする理論や技術を研究しています。専門は、ロボティクスと制御工学です。
■研究テーマ
自動で動く機械が、繰り返しの動きも突発的な動きも安定して行えるようにする制御や診断の研究と、足と車輪を組み合わせた新しいロボットの開発を進めています。
■研究内容と成果
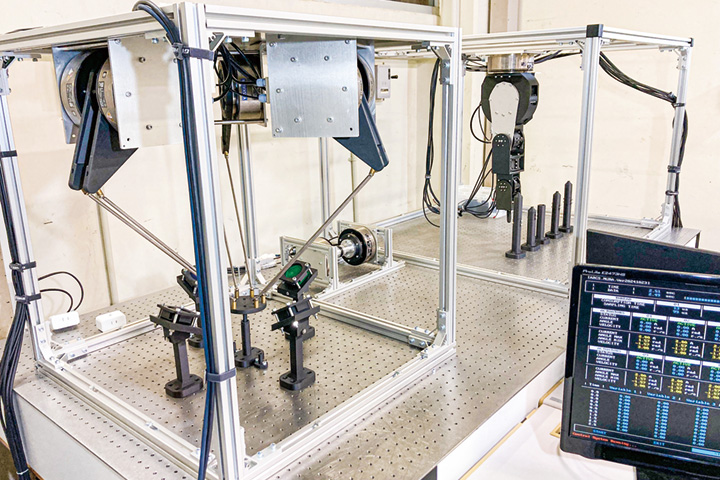
ロボットが最も活躍しているのは工場です。そこでは高速・高精度な繰り返し動作、つまり周期的な運動が求められます。
一方、近年は人と協働するロボットが増え、人の予測困難な動きや突発的な事象など、非周期的な運動への対応も重要になっています。さらに機械の異常動作もまた非周期として現れます。私の周期/非周期という視点からロボットの運動を捉え、制御する研究は非常に独創的で、世界的にも例のないユニークな取り組みです。
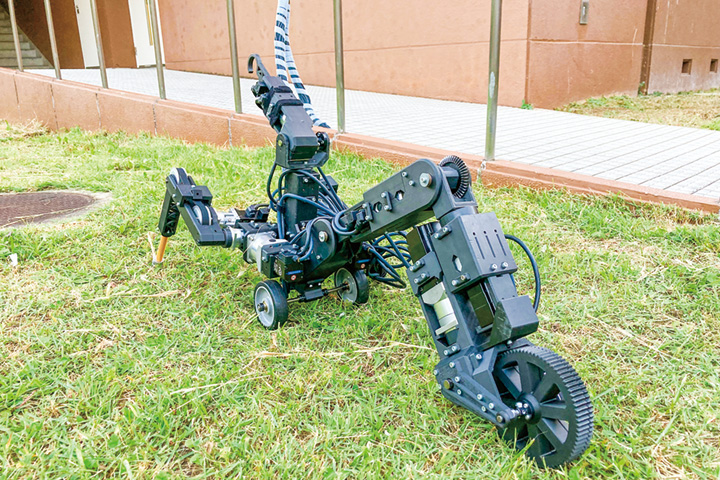
さらに、足や車輪による移動、腕による作業を統合した多機能移動ロボットの開発にも挑戦しています。将来、災害や建設現場で危険作業を担う次世代ロボットとなることを目指しています。
■研究の醍醐味とロボット研究の魅力
研究の面白さは、自ら問いを立てて解くという「自由」にあります。自由に問題を創り、自由に解いていいんです。ロボット研究の魅力は、数学と物理で築いた理論に従い、数式通りにロボットが動く瞬間です。抽象的な数式が現実と結びつき、数学で導かれた世界が実際に動き出す感動こそ、私がロボット研究に魅せられる理由です。
(山北)
1994年千葉県生まれ。2016年慶應義塾大学卒業。慶應義塾大学大学院前期・後期博士課程早期修了。日本学術振興会 特別研究員(DC2・PD)。広島大学大学院先進理工系科学研究科機械工学プログラム機械力学研究室助教を経て、2024年広島大学同准教授。
SHARE
 PAGE TOP
PAGE TOP